
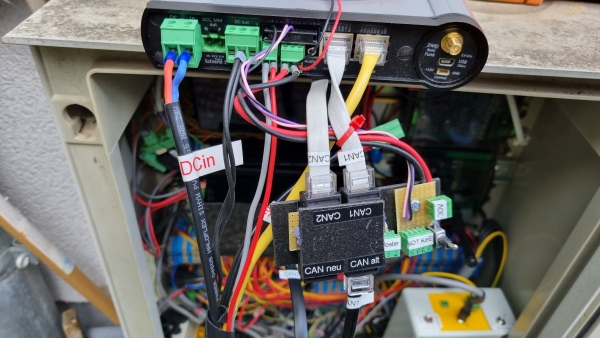
In den sonnigen Phasen zwischen den Regenschauern am Sonntag Nachmittag und nach langer detaillierter Vorbereitung wurde das Basisgerät (Zentrale für den Betrieb der Loks) mit allen vorbereiteten Steckern angeschlossen und der erste Schritt der Inbetriebnahme gestartet.

Aber was hat mich die Geschichte wieder einmal gelehrt: Nie zu viele Änderungen gleichzeitig zu machen. D.h. erst das was schon funktioniert hat mit der neuen “Umgebung verbinden”, prüfen, und dann erst das Softwareupdate machen.
Im Zuge des Softwareupdate wurde zumindest eine wesentliche Einstellung zurückgesetzt und somit war dann keine Kommunikation am CAN-Bus mit den “alten” Geräten möglich.
Problem erkannt und somit kann der Einbau abgeschlossen werden.
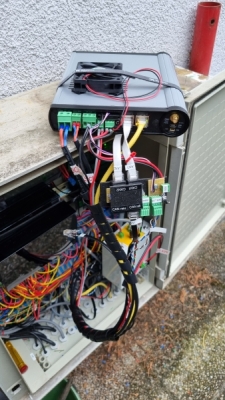

Fertig eingebaut in den Schaltkasten, sieht ein wenig chaotisch aus, aber das Vorgänger Gerät ist auch nur in dem Kasten gelegen.

Wow. Sieht sehr interessant aus. Dachte nicht, dass so viel Technik dahinter steckt. Die letzten Beiträge haben hier einen guten Einblick gegeben.
Wie wäre es mit einer Halterung für die Hut-Schiene aus dem 3D-Ducker?